Difference between revisions of "How to 777"
(→Cruise 巡航) |
(→Direct-To 直飛航點) |
||
| Line 647: | Line 647: | ||
====Direct-To 直飛航點==== | ====Direct-To 直飛航點==== | ||
| − | |||
管制員有時會給予直飛某航點的指令。直飛位置亦可以是不在路線上的航點,導航設備,座標或以導航設備定義的點 | 管制員有時會給予直飛某航點的指令。直飛位置亦可以是不在路線上的航點,導航設備,座標或以導航設備定義的點 | ||
| Line 656: | Line 655: | ||
若管制員的指令是在某航點後直飛,可將直飛航點放在該航點的下一行。此方法將不能顯示側過位置,若需要顯示側過位置可以在到達該航點後再用上述方法直飛航點 | 若管制員的指令是在某航點後直飛,可將直飛航點放在該航點的下一行。此方法將不能顯示側過位置,若需要顯示側過位置可以在到達該航點後再用上述方法直飛航點 | ||
| + | |||
| + | [[File:T7_115201.jpg|400px|]] | ||
====Offset 平行偏置==== | ====Offset 平行偏置==== | ||
Revision as of 18:14, 11 April 2018
Contents
- 1 Operation Introduction 操作簡介
- 1.1 Normal Procedures 正常程序
- 1.1.1 Preflight 飛行前準備
- 1.1.1.1 Flight Management Computer (FMC) 飛行管理系統
- 1.1.1.2 Overhead Panel 檢査艙頂儀錶板
- 1.1.1.3 Glareshield Panel 檢査上儀錶板
- 1.1.1.4 Forward Panel 檢査前儀錶板
- 1.1.1.5 Aisle Stand 檢査中間儀錶板
- 1.1.1.6 PREFLIGHT CHECKLIST 飛行前檢查表
- 1.1.1.7 Departure Clearance 離場許可
- 1.1.1.8 Departure Briefing 離場簡報
- 1.1.1.9 Performance Data Entry 輸入性能資料
- 1.1.1.10 Engine Start 啓動引擎
- 1.1.1.11 BEFORE START CHECKLIST 啓動前檢查表
- 1.1.2 Taxi 滑行
- 1.1.3 Takeoff 起飛
- 1.1.4 Climb 爬升
- 1.1.5 Cruise 巡航
- 1.1.6 Descent 下降
- 1.1.7 Approach 進場
- 1.1.8 Landing 着陸
- 1.1.9 Shutdown 關機
- 1.1.1 Preflight 飛行前準備
- 1.1 Normal Procedures 正常程序
- 2 System Information
Operation Introduction 操作簡介
前言:此簡介以一班從香港出發到台北的航班為例子,使用PMDG的777簡單介紹波音777-300ER的基本系統操作。
由於操作手冊及資料均以英文寫成,因此簡介的中文翻譯盡量參考香港政府部門常用辭彙,中華民國飛航管理程序,海峽兩岸飛航事故類專有名詞對照表等文件
注意:所有資料只作模擬飛行用途,不能用於真實飛行
Normal Procedures 正常程序
Preflight 飛行前準備
- 確保已提交飛行計劃
- 從ATIS/METAR了解機場天氣及運作資料
Flight Management Computer (FMC) 飛行管理系統
首先確保ADIRU(Air Data Inertial Reference Unit)為ON


通過Control Display Unit (CDU)向FMC輸入資料。CDU顯示器左右兩邊各有6個按鈕,上而下順序稱為1L至6L,1R-6R。顯示器内最底為Scratchpad。口口口口為必要填入的資料。
| 步驟 | 附圖 |
|---|---|
|
只要資料齊全輸入次序不重要,簡易方法可以由INIT REF開始逐頁輸入直到NAV RAD
|

|
亦可輸入不在路線上的航點,導航設備,座標或以導航設備定義的點 |

|
|

|
|

|
|

|
|

|
|

|
|

|

Overhead Panel 檢査艙頂儀錶板
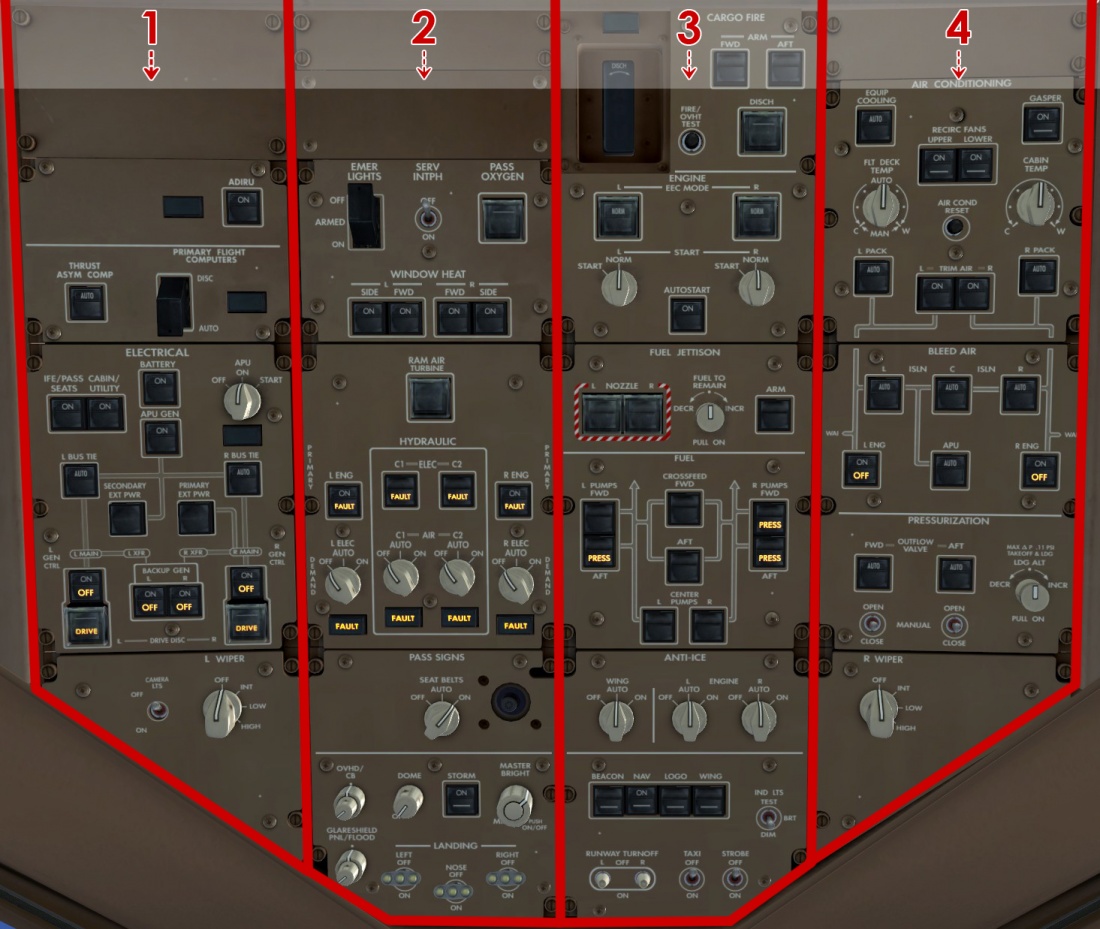

如圖設定艙頂儀錶板
- 啓動APU(如之前未啓動)。當EICAS顯示APU RUNNING時,可移除地面外接電源 EXT PWR (External Power)
- 如加油已完成,安全帶燈號設定為ON
- 導航燈NAV LIGHT長期為ON
- 如在晩上,垂直尾翼燈LOGO LIGHT設定為ON
Glareshield Panel 檢査上儀錶板


EFIS (Electronic Flight Instrument System) Control Panel 電子飛行儀表系統
| 按鈕 | 用途 |
|---|---|
| MINS | 起飛時隱藏不使用。按RST可顯示或隱藏Decision Height(DH)/Altitude(DA)決斷高度。RADIO/BARO分別指以雷達高度或氣壓高度定義決斷高度 |
| FPV | 選擇在PFD顯示或隱藏Flight Path Vector |
| MTRS | 選擇在PFD顯示以米為高度單位。在中國,蒙古國等地方使用 |
| BARO | 設定為機場的QNH。按STD可切換標準大氣壓(QNE)或海平面參考大氣壓(QNH),TA(Transition Altitude)轉換高度以上使用QNE;TL(Transition Level)轉換空層以下使用QNH。IN/HPA分別指氣壓單位英吋汞柱(inHg)或百帕斯卡(hPa) |
| VOR/OFF/ADF | 選擇在ND顯示或隱藏助航設施,一般左右都設定為顯示VOR |
| APP/VOR/MAP/PLAN | 選擇ND的顯示模式,一般設定為MAP。按CTR可將目前位置顯示在ND中間,方便大角度轉向時參考 |
| 10/20/40/80/160/320/640 | 選擇ND的顯示距離。按TFC在ND顯示TCAS資訊,一般在地面TCAS會設成STBY,ND顯示TCAS OFF |
| WXR/STA/WPT/ARPT/DATA/POS/TERR | 選擇在ND分別顯示天氣雷達/助航設施/航點/航點資料(如預計時間和高度限制)/不同系統計算的目前位置/地障資料。在停機坪時WXR和TERR為OFF,避免輻射。一般不使用STA和WPT,避免顯示過量資訊 |
Mode Control Panel (MCP) 模式控制儀錶板
| 按鈕 | 用途 |
|---|---|
| A/T ARM (Autothrottle Arm Switch) | 選擇ARM。左右引擎的自動油門準備開關,必須為ARM才能使用自動油門 |
| F/D ON/OFF (Flight Director) | 左右都選擇ON。分別顯示左右PFD的飛行指引儀 |
| IAS/MACH | 選擇IAS。設定空速單位。選擇V2為設定空速,如未知時先用200 |
| HDG/TRK | 設定起飛時的初始航向/航跡作參考。按SID需要選擇,香港起飛時都使用航跡,雷達引導則使用航向。例如OCEAN2A設定TRK 074 |
| BANK LIMIT | 選擇AUTO。設定傾斜角上限 |
| V/S/FPA | 選擇V/S |
| ALTITUDE | 設定起飛時首個高度上限。例如OCEAN2A設定5000 |
Display Select Unit 顯示選擇儀錶板
| 按鈕 | 用途 |
|---|---|
| L INBD/LWR CTR/R INBD | 一般設定為LWR CTR。選擇顯示資料的位置 |
| ENG/STAT | 分別顯示引擎的次要資料如N2,(Fuel Flow)燃油流量,(Oil Pressure)油壓,(Oil Temperature)油温等;或顯示飛機狀態如APU狀況,緊急供氧系統氣壓和系統故障訊息 |
| ELEC/HYD/FUEL/AIR/DOOR/GEAR/FCTL/CAM | 分別顯示電力系統/液壓系統/燃油系統/機艙加壓系統/起落架/飛行控制系統/地面滑行鏡頭 |
| ECL/COMM/NAV | 分別顯示(Electronic Checklist)電子檢查表/ACARS通訊/ND |
| CANC/RCL(Cancel/Recall) | 隱藏或重新顯示EICAS警告訊息 |
Forward Panel 檢査前儀錶板


- INBOARD DSPL 選擇MFD
- AUTOBRAKE 選擇RTO(Rejected Take-Off)
- FMS 選擇AUTO
Aisle Stand 檢査中間儀錶板
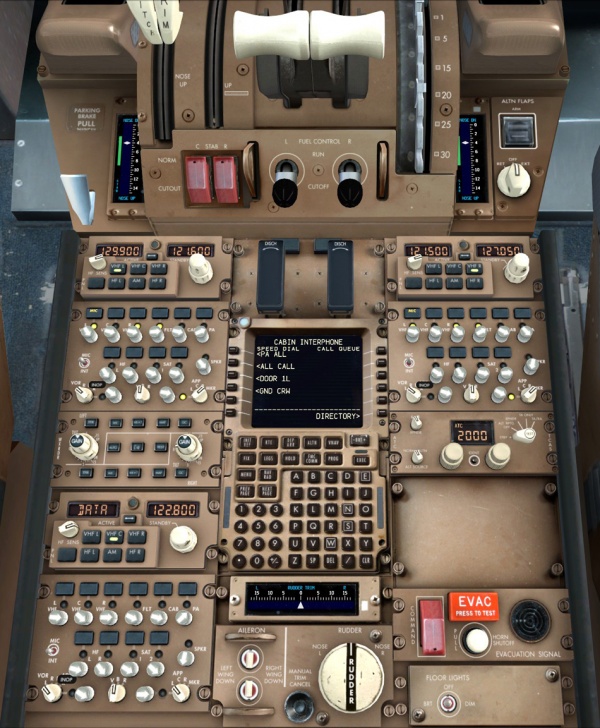

- VHF L 選擇適當頻道。例如ACTIVE設成Hong Kong Delivery 129.9, STANDBY設成Ground North 121.6
- VHF C 一般用作VHF Datalink,以使用ACARS,CPDLC等。
- RUDDER TRIM 確保為0,可按MANUAL TRIM CANCEL重設為0
- VHF R 一般用作監聽緊急頻道121.5。亦可用作收聽ATIS
- Transponder應答機 選擇STBY,應答機電碼2000
設定所有儀錶板後代表飛行前檢查完成
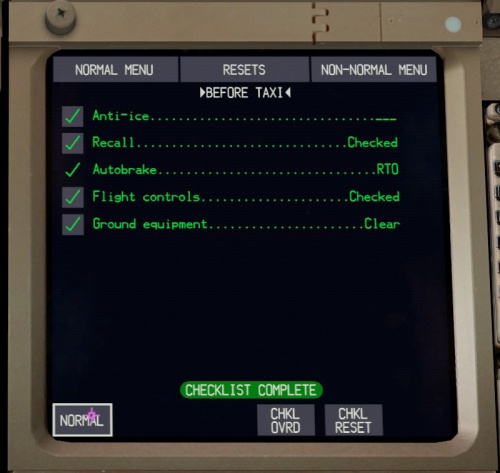
PREFLIGHT CHECKLIST 飛行前檢查表
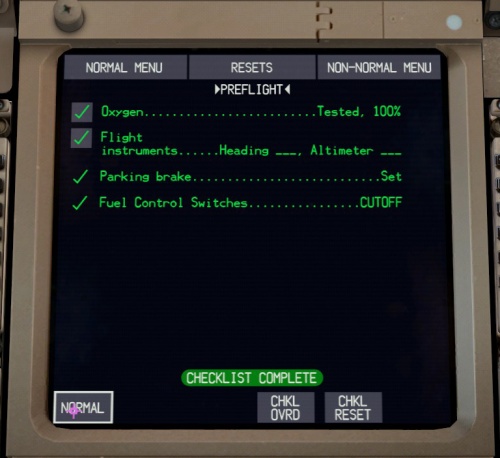

- 檢查表有部分檢查項目系統會自動偵測,這些項目不用讀出
Departure Clearance 離場許可
| 機師 | 管制員 |
|---|---|
| 一般離場許可請求需向管制員提供呼號,停機坪,ATIS資料 Hong Kong Delivery, Cathay 496, Bay November 64, with information Bravo, request clearance to Taipei |
|
| 管制員給予的離場許可包括SID程序,應答機電碼,亦可包括跑道,高度限制(如SID程序没指定)或雷達引導航向等 Cathay 496,cleared to Taipei, OCEAN2A, Squawk 5321 | |
| 覆誦離場許可 Cleared to Taipei, OCEAN2A, Squawk 5321, Cathay 496 || | |
| 管制員 Cathay 496, readback correct, report ready / contact Ground 121.6 when ready |
- 檢査FMC RTE的SID程序及跑道,MCP設定高度
- 輸入應答機電碼
現在PDC(Pre Departure Clearance)開始普及,利用文字傳送冗長和重覆性高的離場許可可以減少溝通失誤和無線電擁擠
使用程序亦與語音請求一樣
Departure Briefing 離場簡報
簡報常見格式為CTWO+,只須提及與一般程序不同的地方或特殊情況
| Chart | 確認使用正確程序的航圖 |
| Terrain | 確認地障高度及位置 |
| Weather | 確認天氣情況及其對一般程序的影響。例如明顯側風,使用防冰系統,低視程操作等 |
| Operational | 與一般程序不同的地方。例如速度上限會延後收起襟翼的時間 |
| Plus | 其他風險及應對方法等 |
Performance Data Entry 輸入性能資料
起飛性能可以總結為引擎推力設定,襟翼設定,跑道長度,跑道表面情況,起飛重量,氣温和大氣壓力的關係。為減低引擎産生高推力時引致的損耗,在確保飛機能滿足1)V1時引擎故障仍能起飛;2)V1前能在跑道盡頭前停下這兩個情況下,減低引擎的起飛推力。
共有兩種方法減少起飛推力,可同時使用:
- Derated Takeoff Thrust (Fixed Derate)固定減額: TO1 / TO2
- Assumed Temperature Method (ATM)假設引擎在特定氣温下所産生的推力,假設氣温越高推力越低
例如起飛重量為252噸,氣温26度,QNH 1014,無風,跑道表面乾,使用07R跑道J1的情況下:推力設定為(Fixed Derate)TO2,(Assumed Temperature)假設氣温47度,襟翼設定5
| 步驟 | 附圖 |
|---|---|
INIT REF - PERF INIT
|

|
THRUST LIM - THRUST LIM
|

|
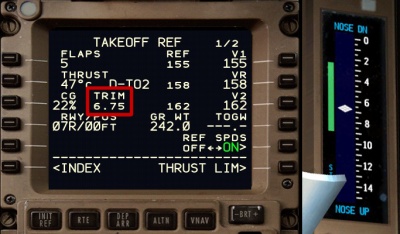
TAKEOFF - TAKEOFF REF 1/2
TAKEOFF - TAKEOFF REF 2/2
|

|
MCP
|

|
VNAV - ACT 177KT CLB 1/3
|

|
VNAV - ECON CRZ 2/3
|

|
輸入以上所有資料後代表已準備好出發
PF CDU顯示TAKEOFF REF 1/2
PM CDU顯示ACT RTE 1 LEGS
Engine Start 啓動引擎
- 確保所有門已關上,機橋已分開
- 確保機輪的楔子已移走
| 機師 | 管制員 |
|---|---|
| 一般後推許可請求需向管制員提供呼號,停機坪 Ground, Cathay 496, Bay November 64, request push and start |
|
|
管制員給予的後推許可包括後推方向或程序,亦可包括跑道 亦可包括後推限制 | |
| 覆誦後推許可 Pushback colour Red, Cathay 496 |
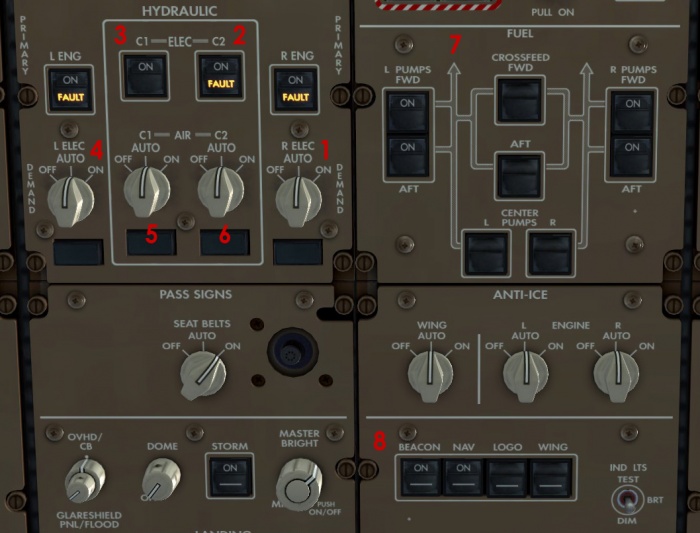

如圖設定艙頂儀錶板
- 按1-6次序加壓液壓系統,避免液壓液在不同系統間移動。R ELEC-AUTO,C2 ELEC-ON,C1 ELEC-ON,L ELEC-AUTO,C1 AIR-AUTO,C2 AIR-AUTO
- 啓動左右的燃料泵。如EICAS顯示FUEL IN CENTER,啓動CENTER PUMP L和CENTER PUMP R
- BEACON LIGHT防撞信號燈設定為ON,表示引擎將啓動
- 按一下RECALL重新顯示EICAS警告訊息,一般情況只會顯示ENG SHUTDOWN,TCAS OFF,確認後按一下RECALL隱藏訊息
- 按控制捍上的Trim Switch配平掣設定水平尾翼的Trim配平,按照TAKEOFF REF 3L顯示的數値設定

BEFORE START CHECKLIST 啓動前檢查表

檢查表完成後便可以叫地面工作人員開始後推
按DSP的ENG,在MFD顯示引擎次要資料
|

|
|

|
|

|
後推完成及兩個引擎都啓動完成後可以叫地面工作人員離開
Taxi 滑行
測試控制面:副翼緩慢地由一邊推到另一邊,升降舵緩慢地由一邊推到另一邊,最後方向舵緩慢地由一邊推到另一邊
當地面工作人員退後至安全位置後會高舉Steering Bypass Pin轉向操作凌駕栓,代表飛機準備好滑行
BEFORE TAXI CHECKLIST 滑行前檢查表
Taxi Clearance 滑行許可
| 機師 | 管制員 |
|---|---|
| 滑行許可請求 Cathay 496, request taxi |
|
| 管制員給予的滑行許可包括滑行道及跑道等待點,亦可包括跑道 Cathay 496, taxi Bravo 7, Bravo, Whiskey, Hotel to Juliet 1 Holding Point, Runway 07R 亦可包括滑行限制
| |
| 覆誦滑行許可 Taxi Bravo 7, Bravo, Whiskey, Hotel to Juliet 1 Holding Point, Runway 07R, Cathay 496 |
明白滑行許可的路線後可以開啓TAXI LIGHT滑行燈,晩上時額外開啓RUNWAY TURNOFF LIGHT跑道燈
按一下方向舵上的煞制解除Parking Brake停放制動裝置
開始滑行,停機坪範圍和大角度轉向時速度控制在10節内

PF ND顯示WXR; PM ND顯示TERR
滑行途中留意天氣變化對起飛性能的影響
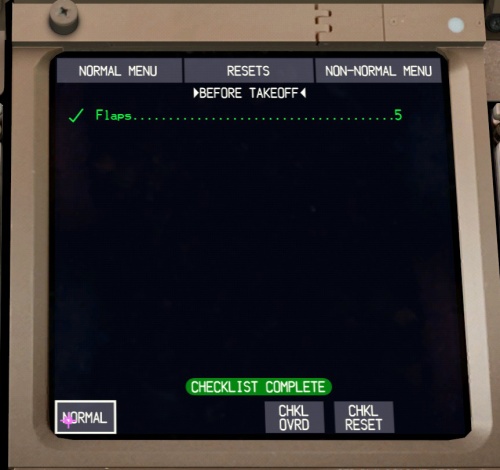
BEFORE TAKEOFF CHECKLIST 起飛前檢查表
- 當接近跑道等待點時執行起飛前檢查表

Takeoff Clearance 起飛許可
| 機師 | 管制員 |
|---|---|
|
接近跑道等待點時地面管制員會提供頻道以聯絡塔台管制員 | |
|
覆誦 |
|
| 聯絡塔台管制員 Tower South, Cathay 496 |
|
|
管制員會指示在跑道等待點等候,暫不能進入跑道 或會給予進入跑道等待的許可,可包括跑道及跑道等待點
或直接給予起飛許可,包括風向 | |
| 覆誦 Runway 07R, cleared for takeoff, Cathay 496 |
- 進入跑道前TCAS設成TA/RA,開啓LANDING LIGHT(着陸燈)和STROBE LIGHT(閃光燈)
Takeoff 起飛
| Header text | Header text |
|---|---|
|
1. 對正跑道後油門推至55%N1,確保兩邊引擎的推力一致 |

|
|
2. 再按油門上的TO/GA掣,自動油門啓動變成THR REF,油門會自動設定起飛推力。手仍需放在油門上,方便隨時中止起飛。當起飛推力N1和實際N1一致時PM叫Thrust Set
3. 空速80節時PM叫80 Knots,自動油門變成HOLD (若80節仍未設定好起飛推力須中止起飛) 4. 空速V1時系統會自動叫V1,手從油門上移開。空速VR時PM叫Rotate,以毎秒約2度拉起機頭,直至15度後再跟隨FD (Flight Director) |

|
|
5. 雷達高度穩定上升時PM叫Positive Rate,PF叫Gear Up,PM收起落架 6. 雷達高度50呎時LNAV會啓動,PF叫LNAV 7. 雷達高度200呎以上時Autopilot自動駕駛即可使用,啓動時需確保Attitude飛機姿態接近FD指令 8. 高度400呎時VNAV會啓動,PF叫THR REF, VNAV SPD |

|
|
9. 當高度達到Acceleration Height加速高度時會自動加速至下一個空速上限 10. 當空速達到Flaps 5 Maneuvering Speed 襟翼操縱空速以上(即空速計綠色5字的速度)並穩定上升時,PF叫Flaps 1,PM檢査空速後叫Speed checks, Flaps 1並設定襟翼1 (注意:除起飛外,空速必須維持在當前襟翼設定的襟翼操縱空速以上,即是襟翼收起時空速必須在綠色UP字以上,如此類推,以保證操縱性能) (注意:設定襟翼前須確保空速上限不會在襟翼操縱空速以下) |

|
|
11. 設定襟翼1時會觸發Thrust Reduction,自動油門會設定爬升推力。PF叫Climb Thrust,PM檢査EICAS顯示的推力上限後叫CLB 2 Set。EICAS顯示的推力上限會由D-TO 2 +47C 變成CLB 2
|

|
Climb 爬升

| 機師 | 管制員 |
|---|---|
|
起飛後塔台管制員會提供頻道以聯絡離場管制員 | |
|
覆誦 |
|
| 聯絡離場管制員,並提供現時高度和高度上限方便雷達識別,亦可提供SID Departure, Cathay 496,passing 1800 climbing 5000 |
|
|
管制員會指示新高度上限
| |
| 覆誦 Climb 9000, Cathay 496 |
- 管制員指示爬升後MCP設定高度可設成9000,但不要按高度設定掣,否則PORPA的MAX 5000ft會被取消,若過PORPA後按高度設定掣則會取消TD的220KT (除非管制員指明取消PORPA的高度上限)
- 若爬升性能好時,飛機會於PORPA前到達5000呎,FMA會自動進入SPD VNAV PTH,維持5000呎直至PORPA。到PORPA時若MCP設定高度高過5000呎,FMA會自動進入THR REF VNAV SPD,再次爬升
- 由於TD前的空速上限是220KT,因此暫時未能收起襟翼
- 轉向時設定MCP的設定航跡至新航跡
- ND的綠色弧線為預測到達MCP設定高度的位置


- 到達9000呎時,由於FMC並没有9000呎限制,FMA會自動進入SPD VNAV ALT,維持9000呎
- 若管制員會指示取消速度限制,可以1. 按一下MCP的空速設定掣開啓空速設定窗口並設定新空速;或2. 按一下高度設定掣取消下一個FMC垂直路線的空速限制 (注意:如果下一個限制包括高度則不能用此方法,否則高度限制會一併取消)
(注意:大部份地方均設10000呎以下限速250節,可以參考航圖程序,除非管制員指明取消)
(注意:若香港管制員指示:High speed approved/Cancel speed restrictions/No speed control。表示航圖程序的空速限制及10000呎以下限速250節都已取消)
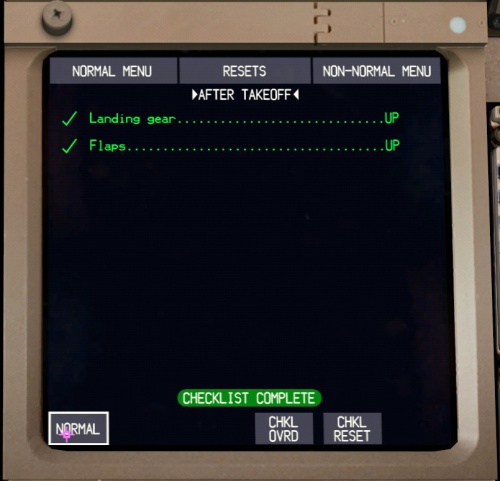
AFTER TAKEOFF CHECKLIST 起飛後檢查表
- 收起襟翼後執行起飛後檢查表

檢查表完成後關掉NOSE LANDING LIGHT機頭着陸燈,RUNWAY TURNOFF LIGHT跑道燈及TAXI LIGHT滑行燈。如之前有使用ENGINE ANTI-ICE亦可設回AUTO
- 當還有1000呎平飛時,PM叫One to go,還有900呎平飛時會有警報音
- 管制員會指示新高度上限,重設MCP設定高度並按一下高度設定掣進入THR REF VNAV SPD,繼續爬升


- 爬升通過轉換高度(Transition Altitude),按一下STD切換標準大氣壓,確認PFD高度計下顯示STD。轉換高度以上稱為飛行高度層(Flight Level),例如35000呎稱為FL350
- 通過10000呎時關掉LANDING LIGHT着陸燈。當再没空速限制時,確認MCP的空速設定窗口已關掉,讓FMC設定爬升空速,要關掉空速設定窗口按一下空速設定掣


- ND的綠色T/C (Top of Climb)為預測到達巡航高度的位置
- 按一下EFIS的DATA可在ND顯示螢幕内航點的預計到達時間


- 到達巡航高度時,FMA會自動進入SPD VNAV PTH,維持高度。FMC會進入Cruise Phase巡航階段
Cruise 巡航

PF CDU顯示VNAV - ACT ECON CRZ
PM CDU顯示LEGS - ACT RTE 1 LEGS
- VNAV - ACT ECON CRZ會顯示基本巡航資料
| 1L 巡航高度 CRZ ALT | 可修改以參考其他巡航高度的到達時間及燃料預測 |
| 2L 巡航空速 CRZ SPD | 預設為ECON,可人手輸入以節或馬赫數為單位的空速 |
| 3L 維持當前性能需要的N1 TARGET N1 | 參考用 |
| 4L 巡航爬升的高度差 STEP SIZE | 令FMC能計算下個巡航高度並預測爬升的最佳點。預設為RVSM,即縮減垂直隔離空域中的下個巡航高度。可輸入R(RVSM),I(ICAO),0或1000-9000。例子:巡航於FL330,但FL350已被佔用。輸入4000令FMC能直接預測FL370最佳爬升點。當之後不再進行巡航爬升時可輸入0 |
| 5L 經濟巡航速度 ECON SPD | 人手輸入2L的巡航空速後出現,按5L使巡航空速變回ECON SPD (經濟巡航速度取決於Cost Index,越大越快但同時油耗會上升) |
| 6L RTA PRROGRESS (Required Time of Arrival) | 此頁面可輸入一航點及希望到達該航點的時間,FMC會計算所需的巡航速度 |
| 1R 下個巡航高度 STEP TO ALT | 預設為STEP SIZE計算的下個巡航高度。此頁面亦可人手輸入下個巡航高度,FMC會忽略STEP SIZE並預測人手輸入巡航高度的最佳爬升點。此格在下降起點T/D(Top of Descent)前200海浬;或目的地前500海浬;或STEP SIZE為0時消失 (注意:當希望用回STEP SIZE功能時必須刪除1R的人手輸入巡航高度,刪除後字體會變小) |
| 2R 最佳爬升點 STEP AT | 最佳爬升點的預測時間和距離,如已通過最佳爬升點則會顯示NOW。此格在下降起點前200海浬會改為顯示T/D的預測時間和距離。ND的綠色S/C為預測最佳爬升點 |
| 3R DEST ETA/FUEL | 預測到達目的地的時間和燃料。此格考慮上述輸入的資料並假設在最佳爬升點進行巡航爬升 |
| 4R 最佳巡航高度OPT ALT/最高巡航高度MAX ALT/推薦巡航高度RECMD ALT | 最佳巡航高度配合ECON SPD可達至最低成本,只考慮總重和Cost Index,會隨時間改變;最高巡航高度為現有性能下可達到的高度,考慮推力性能和操縱性能,會隨環境改變。上限為認證最高高度43100ft。推薦巡航高度為前方數百海浬最有效率的巡航高度,考慮Step Size,Cost Index,總重和預測風速風向 |
| 5R 引擎失效 ENG OUT | 巡航高度變成單引擎巡航高度,巡航空速變成單引擎最低阻力空速。如果現行高度高過單引擎巡航高度,按EXEC後會開始飄降(Drift Down)。使用ENG OUT時5R會顯示ALL ENG。 |
| 6R LRC (Long Range Cruise) | 選擇LRC速度以最大航程的1%換取較快巡航空速,不考慮Cost Index |
Step Climb 巡航爬升
當巡航一段時間後飛機會因燃料消耗而變輕,因此可爬升至更高巡航高度進一歩減少阻力,以較低油耗巡航。可是最佳爬升點需一併考慮不同高度的風速風向及温度對性能的影響,FMC會根據飛機總重,Cost Index,不同高度的預測風速風向和温度以及輸入的STEP SIZE計算下個最佳爬升點。ND的綠色S/C為預測最佳爬升點。考慮巡航爬升時應參考推薦巡航高度
- 向管制員申請爬升許可
- 得到爬升許可並覆誦正確後,重設MCP設定高度並按一下高度設定掣進入THR REF VNAV SPD。亦可使用FLCH或V/S爬升,但需先重設MCP設定高度並按一下高度設定掣。FMC會進入Cruise Climb巡航爬升階段
- 當還有1000呎平飛時,PM叫One to go,還有900呎平飛時會有警報音
- 到達新巡航高度時,FMA會自動進入SPD VNAV PTH,維持高度。FMC會再次進入Cruise Phase巡航階段
Direct-To 直飛航點
管制員有時會給予直飛某航點的指令。直飛位置亦可以是不在路線上的航點,導航設備,座標或以導航設備定義的點
- 覆誦正確後在ACT RTE 1 LEGS尋找該航點,並按一下該航點對應的1L-5L,複製航點到Scratchpad
- 再按一下1L。若要在ND顯示被跳過航點的側過位置Abeam Point,可按4R選ABEAM PTS SELECTED
- 確認ND無誤後按EXEC執行
若管制員的指令是在某航點後直飛,可將直飛航點放在該航點的下一行。此方法將不能顯示側過位置,若需要顯示側過位置可以在到達該航點後再用上述方法直飛航點


Offset 平行偏置
巡航階段時多用於避開雷雨區,向管制員申請偏置許可時表明偏置方向和偏置距離。另外在中國領空内管制員亦常用平行偏置
Hong Kong Radar, Cathay 496, request 5 miles right of track due weather
- 得到許可後在RTE 2/3輸入偏置方向和距離到6R
- 確認ND無誤後按EXEC執行
- 若使用LNAV會以45度攔截新平行航線。亦可先用TRK SEL再按一下LNAV準備啓動,接近新平行航線時LNAV便會自動啓動。這樣便可以不斷轉換航跡避開雷雨區,同時不會超過輸入的偏置距離
注意:離場或進場程序内不能使用平行偏置,若要避開雷雨區需直接提出航向請求,同時亦可提供保持航向的距離以方便管制員安排
Hong Kong Approach, Cathay 496, request heading 230 for the next 40 miles due weather
Holding
LEGS Page
FIX Page
ALTN Page
Arrival Programming 進場規劃
Descent 下降
Approach 進場
ILS
LOC/LDA/VOR
RNAV(GNSS)
RNAV(RNP)
Landing 着陸
Shutdown 關機
System Information
Flight Mode Annunciator (FMA) 飛行狀態指示器
在主飛行顯示器 (PFD)上方顯示飛行模式。左至右分別為自動油門模式,水平模式和俯仰模式。已啓動的模式為綠色,準備啓動的模式為白色,模式啓動時10秒内會顯示綠色方格。飛行模式的控制指令以飛行指引儀(FD)顯示。除起飛和着陸外,PF需呼叫所有FMA轉變,並由PM確認。例如PFTHR REF,VNAV SPD,PMCheck

Autothrottle Modes 自動油門模式
MCP的Autothrottle Arm Switch (A/T ARM)必須為ARM才能使用自動油門,只有一邊引擎的A/T ARM ON時自動油門模式會顯示L SPD,R THR等
| 模式 | 意思 |
|---|---|
| THR (Thrust) | 設定推力以維持Pitch Mode所需的垂直速度; 復飛時按一下TO/GA啓動THR,爬升率為毎分鐘2000呎 |
| THR REF | 推力維持EICAS顯示的推力上限; 復飛時按兩下TO/GA啓動THR REF,以EICAS顯示的推力上限爬升 |
| IDLE | 油門至怠速,然後進入HOLD。着陸時在雷達高度25呎時啓動 |
| HOLD | 油門可人手控制以推力調節空速或下降率 |
| SPD | 推力維持MCP或FMC的設定空速 |
Roll Modes 水平模式
| 模式 | 意思 |
|---|---|
| TO/GA (Take-Off/Go-Around) | 起飛時:維持離開地面時的航跡; 空中時:維持TO/GA啓動時的航跡 |
| LNAV | 雷達高度高於50呎時啓動,按FMC的路線航行 |
| HDG HOLD (Track Hold) | 維持航向,若HDG HOLD啓動時未改平會先改平並維持改平後的航向 |
| HDG SEL (Heading Select) | 轉向MCP的設定航向 |
| TRK HOLD (Track Hold) | 維持航跡,若TRK HOLD啓動時未改平會先改平並維持改平後的航跡 |
| TRK SEL (Track Select) | 轉向MCP的設定航跡 |
| LOC (Localizer) | 維持航向台中心線 |
| ROLLOUT | 着地後維持航向台中心線 (自動着陸用) |
Pitch Modes 俯仰模式
| 模式 | 意思 |
|---|---|
| TO/GA (Take-Off/Go-Around) | 起飛時:以俯仰維持目標空速V2+15節。若現行空速超過目標空速5秒,目標空速會重置成現行空速或V2+25節(較低者); 空中時:以俯仰維持目標空速,目標空速為現行空速或MCP的設定空速(較高者) |
| VNAV SPD (VNAV Speed) | 以俯仰維持FMC的設定空速。按下MCP的空速設定掣時會出現設定空速,以俯仰維持MCP的設定空速。下降時VNAV SPD啓動代表偏離FMC的垂直路線。自動油門爬升時為THR REF,下降時先IDLE後HOLD |
| VNAV PTH (VNAV Path) | 維持FMC的設定高度或垂直路線。自動油門平飛時為SPD,下降時先IDLE後HOLD,進場時為SPD (爬升時不設VNAV PTH) |
| VNAV ALT (VNAV Altitude) | FMC的垂直路線與MCP的設定高度有衝突時啓動並保持高度,改變MCP的設定高度並按一下高度設定掣去繼續爬升或下降。自動油門為SPD [注意:毎多按一下高度設定掣會取消下一個FMC垂直路線的(空速或高度)限制] |
| ALT (Altitude Hold) | 按下MCP HOLD時:維持ALT啓動時的高度; 在V/S, FPA, FLCH到達MCP的設定高度時:維持MCP的設定高度。自動油門為SPD |
| FLCH SPD (Flight Level Change Speed) | 按下MCP FLCH時會出現設定空速,以俯仰維持設定空速。自動油門爬升時為THR,下降時先IDLE後HOLD |
| V/S (Vertical Speed) | 按下MCP VS/FPA時會出現現行垂直速度和設定空速,以俯仰維持設定垂直速度。自動油門為SPD [注意:設定垂直速度過大時未必可以保持設定空速] |
| FPA (Flight Path Angle) | 按下MCP VS/FPA時會出現現行俯仰角和設定空速,以俯仰維持設定俯仰角。自動油門為SPD [注意:設定俯仰角過大時未必可以保持設定空速] |
| G/S (Glide Slope) | 維持ILS下滑台中心線 |
| FLARE | 在雷達高度40-60呎時啓動,完成平飄 (自動着陸用) |